Recently, more and more illegal street races have been spotted at night in the city, and they have become a serious threat to public safety. Therefore, the Police Chief has decided to deploy speed cameras on the streets to collect evidence.
There are N+1 intersections in the city, connected by N roads. Every road has the same length of 1. A street race may take place between any two different intersections by using the roads connecting them. Limited by their budget, the police are able to deploy at most K speed cameras on these N roads. These K speed cameras should be installed such that the length of any possible street race route not covered by speed cameras should be as short as possible.
You are given a map of the city in the form of two arrays, A and B of length N, and an integer K:
- For each J (0 ≤ J < N) there is a road connecting intersections A[J] and B[J].
The Police Chief would like to know the minimum length of the longest path out of surveillance after placing at most K speed cameras.
Write a function:
def solution(A, B, K)
that, given arrays A and B of N integers and integer K, returns the minimum length of the longest path unmonitored by speed cameras after placing at most K speed cameras.
For example, given K = 2 and the following arrays:
A[0] = 5 B[0] = 1 A[1] = 1 B[1] = 0 A[2] = 0 B[2] = 7 A[3] = 2 B[3] = 4 A[4] = 7 B[4] = 2 A[5] = 0 B[5] = 6 A[6] = 6 B[6] = 8 A[7] = 6 B[7] = 3 A[8] = 1 B[8] = 9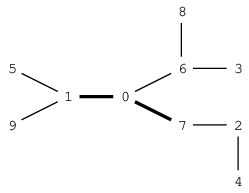
the function should return 2. Two speed cameras can be installed on the roads between intersections 1 and 0 and between intersections 0 and 7. (Another solution would be to install speed cameras between intersections 0 and 7 and between intersections 0 and 6.) By installing speed cameras according the first plan, one of the longest paths without a speed camera starts at intersection 8, passes through intersection 6 and ends at intersection 3, which consists of two roads. (Other longest paths are composed of intersections 5, 1, 9 and 7, 2, 4).
Write an efficient algorithm for the following assumptions:
- N is an integer within the range [1..50,000];
- each element of arrays A and B is an integer within the range [0..N];
- K is an integer within the range [0..N];
- the distance between any two intersections is not greater than 900.
def solution(A, B, K):
M = len(A) + 1
class Node(object):
def __init__(self, idx):
self.idx = idx
self.neighbours = []
self.children = []
self.height = -1
self.parent = None
graph = [Node(idx) for idx in xrange(M)]
for v1, v2 in zip(A, B):
graph[v1].neighbours.append(graph[v2])
graph[v2].neighbours.append(graph[v1])
def root(node, parent=None):
node.parent = parent
for child in node.neighbours:
if child is parent: continue
node.children.append(child)
root(child, node)
root(graph[0])
def needed_cameras(node, allowed_diameter):
result = 0
node.height = 0
for child in node.children:
result += needed_cameras(child, allowed_diameter)
sigh = sorted((child.height, cid, child)
for cid, child in enumerate(node.children)
if child.height < allowed_diameter)
sigh = [child for _, _, child in sigh]
result += len(node.children) - len(sigh)
while len(sigh) > 1 and sigh[-1].height + sigh[-2].height + 2 > allowed_diameter:
sigh.pop()
result += 1
for child in sigh:
node.height = max(node.height, 1 + child.height)
return result
left = 0
right = 900
while left < right:
mid = (left + right) / 2
need = needed_cameras(graph[0], mid)
if need <= K:
right = mid
else:
left = mid + 1
return left
def solution(A, B, K):
M = len(A) + 1
class Node(object):
def __init__(self, idx):
self.idx = idx
self.neighbours = []
self.children = []
self.height = -1
self.parent = None
graph = [Node(idx) for idx in xrange(M)]
for v1, v2 in zip(A, B):
graph[v1].neighbours.append(graph[v2])
graph[v2].neighbours.append(graph[v1])
def root(node, parent=None):
node.parent = parent
for child in node.neighbours:
if child is parent: continue
node.children.append(child)
root(child, node)
root(graph[0])
def needed_cameras(node, allowed_diameter):
result = 0
node.height = 0
for child in node.children:
result += needed_cameras(child, allowed_diameter)
sigh = sorted((child.height, cid, child)
for cid, child in enumerate(node.children)
if child.height < allowed_diameter)
sigh = [child for _, _, child in sigh]
result += len(node.children) - len(sigh)
while len(sigh) > 1 and sigh[-1].height + sigh[-2].height + 2 > allowed_diameter:
sigh.pop()
result += 1
for child in sigh:
node.height = max(node.height, 1 + child.height)
return result
left = 0
right = 900
while left < right:
mid = (left + right) / 2
need = needed_cameras(graph[0], mid)
if need <= K:
right = mid
else:
left = mid + 1
return left
([0], [1])
def solution(A, B, K):
M = len(A) + 1
class Node(object):
def __init__(self, idx):
self.idx = idx
self.neighbours = []
self.children = []
self.height = -1
self.parent = None
graph = [Node(idx) for idx in xrange(M)]
for v1, v2 in zip(A, B):
graph[v1].neighbours.append(graph[v2])
graph[v2].neighbours.append(graph[v1])
def root(node, parent=None):
node.parent = parent
for child in node.neighbours:
if child is parent: continue
node.children.append(child)
root(child, node)
root(graph[0])
def needed_cameras(node, allowed_diameter):
result = 0
node.height = 0
for child in node.children:
result += needed_cameras(child, allowed_diameter)
sigh = sorted((child.height, cid, child)
for cid, child in enumerate(node.children)
if child.height < allowed_diameter)
sigh = [child for _, _, child in sigh]
result += len(node.children) - len(sigh)
while len(sigh) > 1 and sigh[-1].height + sigh[-2].height + 2 > allowed_diameter:
sigh.pop()
result += 1
for child in sigh:
node.height = max(node.height, 1 + child.height)
return result
left = 0
right = 900
while left < right:
mid = (left + right) / 2
need = needed_cameras(graph[0], mid)
if need <= K:
right = mid
else:
left = mid + 1
return left
[[0], [1], 0]
def solution(A, B, K):
M = len(A) + 1
class Node(object):
def __init__(self, idx):
self.idx = idx
self.neighbours = []
self.children = []
self.height = -1
self.parent = None
graph = [Node(idx) for idx in xrange(M)]
for v1, v2 in zip(A, B):
graph[v1].neighbours.append(graph[v2])
graph[v2].neighbours.append(graph[v1])
def root(node, parent=None):
node.parent = parent
for child in node.neighbours:
if child is parent: continue
node.children.append(child)
root(child, node)
root(graph[0])
def needed_cameras(node, allowed_diameter):
result = 0
node.height = 0
for child in node.children:
result += needed_cameras(child, allowed_diameter)
sigh = sorted((child.height, cid, child)
for cid, child in enumerate(node.children)
if child.height < allowed_diameter)
sigh = [child for _, _, child in sigh]
result += len(node.children) - len(sigh)
while len(sigh) > 1 and sigh[-1].height + sigh[-2].height + 2 > allowed_diameter:
sigh.pop()
result += 1
for child in sigh:
node.height = max(node.height, 1 + child.height)
return result
left = 0
right = 900
while left < right:
mid = (left + right) / 2
need = needed_cameras(graph[0], mid)
if need <= K:
right = mid
else:
left = mid + 1
return left
[[0], [1], 1]
def solution(A, B, K):
M = len(A) + 1
class Node(object):
def __init__(self, idx):
self.idx = idx
self.neighbours = []
self.children = []
self.height = -1
self.parent = None
graph = [Node(idx) for idx in xrange(M)]
for v1, v2 in zip(A, B):
graph[v1].neighbours.append(graph[v2])
graph[v2].neighbours.append(graph[v1])
def root(node, parent=None):
node.parent = parent
for child in node.neighbours:
if child is parent: continue
node.children.append(child)
root(child, node)
root(graph[0])
def needed_cameras(node, allowed_diameter):
result = 0
node.height = 0
for child in node.children:
result += needed_cameras(child, allowed_diameter)
sigh = sorted((child.height, cid, child)
for cid, child in enumerate(node.children)
if child.height < allowed_diameter)
sigh = [child for _, _, child in sigh]
result += len(node.children) - len(sigh)
while len(sigh) > 1 and sigh[-1].height + sigh[-2].height + 2 > allowed_diameter:
sigh.pop()
result += 1
for child in sigh:
node.height = max(node.height, 1 + child.height)
return result
left = 0
right = 900
while left < right:
mid = (left + right) / 2
need = needed_cameras(graph[0], mid)
if need <= K:
right = mid
else:
left = mid + 1
return left
[[0], [1], 1]
def solution(A, B, K):
M = len(A) + 1
class Node(object):
def __init__(self, idx):
self.idx = idx
self.neighbours = []
self.children = []
self.height = -1
self.parent = None
graph = [Node(idx) for idx in xrange(M)]
for v1, v2 in zip(A, B):
graph[v1].neighbours.append(graph[v2])
graph[v2].neighbours.append(graph[v1])
def root(node, parent=None):
node.parent = parent
for child in node.neighbours:
if child is parent: continue
node.children.append(child)
root(child, node)
root(graph[0])
def needed_cameras(node, allowed_diameter):
result = 0
node.height = 0
for child in node.children:
result += needed_cameras(child, allowed_diameter)
sigh = sorted((child.height, cid, child)
for cid, child in enumerate(node.children)
if child.height < allowed_diameter)
sigh = [child for _, _, child in sigh]
result += len(node.children) - len(sigh)
while len(sigh) > 1 and sigh[-1].height + sigh[-2].height + 2 > allowed_diameter:
sigh.pop()
result += 1
for child in sigh:
node.height = max(node.height, 1 + child.height)
return result
left = 0
right = 900
while left < right:
mid = (left + right) / 2
need = needed_cameras(graph[0], mid)
if need <= K:
right = mid
else:
left = mid + 1
return left
The solution obtained perfect score.